Carlos Maximiliano Correa; Carlos Etcheverry; Pablo Leonel Etcheverry; Paula Soledad Ludueña; Ariel Ferreira Szpiniak
Universidad Nacional de Río Cuarto
Jornadas Argentinas de Didáctica de las Ciencias de la Computación (JADiCC2022). 18, 19 y 20 de agosto de 2022. Ciudad de Corrientes, Argentina JaDiCC 2022
Resumen
Motivados por el propósito de crear un robot basado en desarrollos locales, adaptado a nuestro medio y contexto social, que satisfaga las demandas educativas y lúdicas, y con el objetivo de abrir nuevos caminos hacia la robótica, desde 2019 y en el marco del Proyecto AMULEN, hemos trabajado en el desarrollo de la nueva versión del robot educativo soberano, al cual hemos llamado Piche. Su nombre proviene de la lengua rankülche que significa peludo, armadillo. Los Rankülches, más conocidos como Ranqueles, son un pueblo originario muy referenciado en la zona de Río Cuarto. A su vez, el peludo o Piche es uno de los animales autóctonos en éstas zonas geográficas, lo que nos inspiró a crear un robot basado en nuestras raíces; que ayude a descubrir vocaciones científicas en el área de programación y robótica y que contribuya a la soberanía tecnológica.
Palabras clave: Programación, Robótica, Educación, AMULEN, Piche.
1. Introducción
Debido a que hoy en día existen fuertes políticas públicas para reducir la brecha digital de 1°, 2° y 3° orden; que desde la creación del Programa Conectar Igualdad, se promueve la inclusión digital e impulsa la industria nacional y que se encuentran muchas dificultades al momento de disponer de un robot para aprender programación y robótica en las aulas, es preciso gestar el desarrollo de un robot que permita abarcar todas las dimensiones descritas, en prácticas concretas tanto en los espacios áulicos, así como también en la producción de material didáctico, en las formaciones y capacitaciones que garanticen el vínculo “conocimiento-sociedad” (en términos de inclusión socio-educativa), evitando de esta manera que la educación digital se limite a equipar escuelas, en especial con tecnologías que responden a otras realidades socio-culturales y podrían no resultar aptas para recrearlas o adaptarlas a nuestros contextos, como los dispositivos cerrados provenientes de empresas internacionales que proveen un mismo paquete tecnológico a todos los países que deciden adoptarlo, sumado a software propietario sin posibilidades de adaptación.
En síntesis, el desafío es crear un robot educativo que tiene como objetivo brindar una doble solución, por un lado dar respuesta a las demandas educativas y lúdicas actuales y por el otro, ofrecer acceso a la tecnología a todas las personas que quieran aprender o profundizar su conocimiento en robótica y programación.
2. Antecedentes
En el marco del Proyecto AMULEN desarrollamos un robot educativo. AMULEN es una palabra proveniente de la lengua rankülche y significa caminar o progresar. Los Rankülches, más conocidos como Ranqueles, son un pueblo originario del suelo que habitamos en el sur de Córdoba; La Pampa; sur de San Luis y oeste de Buenos Aires. Rankül significa caña o carrizo, y che quiere decir persona o gente, es decir gente de los cañaverales. Su nombre y su lengua nos inspiraron en el desarrollo de un dispositivo adaptado a nuestro medio y contexto social, basado en raíces locales y soberanía tecnológica, que pudiera satisfacer las necesidades de los distintos niveles educativos.
El proyecto AMULEN fue propuesto y aceptado en la segunda convocatoria a Proyectos de Estímulo a la Vocación Emprendedora (2019-2020), y actualmente participa de la tercera (2021-2022). Además, forma parte de las acciones desarrolladas por el Proyecto de Investigación “Pensamiento Computacional y los Núcleos de Aprendizajes Prioritarios de Educación Digital, Programación y Robótica (NAPEDRyP) desde un paradigma inclusivo y con compromiso social. Aportes para la implementación de una propuesta educativa digital concreta en contexto de territorio” (2021-2022), todos aprobados y financiados por la Universidad Nacional de Río Cuarto.
En la actualidad existe, tanto a nivel nacional como internacional, una creciente demanda insatisfecha de profesionales en las áreas de las ciencias exactas e ingenierías. Por ese motivo se definió que los integrantes del proyecto AMULEN y becarios (estudiantes de las carreras de computación e ingeniería de la UNRC) trabajaran en el desarrollo de un robot siguiendo un proceso productivo vigente en las Software Factory del país. Más allá del robot en sí, se consideró sumamente importante que los estudiantes becarios incorporasen experiencias y fortalezas en habilidades blandas y duras.
Durante la primera etapa del proyecto, se diseñó y construyó el primer prototipo del robot educativo basado en Arduino, para dar los primeros pasos en el abordaje de conceptos vinculados a la programación y robótica, como así también para ser una adecuada plataforma educativa y de investigación para las escuelas. Luego se adaptó un entorno de programación por bloques libre y se desarrollaron nuevos bloques que permiten interactuar de manera muy simple con él (Correa et. at, 2021). Al mismo tiempo, durante esta primera etapa, con el objetivo de conocer mejor los productos disponibles y los desafios afrontados por los mismos productos (similares en el sector) al momento de implementar robótica educativa; se identificaron y estudiaron diversas empresas destinadas a brindar hardware y software orientados a la robótica educativa, entre ellas: IT10, RobotGroup, LEGO, Robobloq, Mis Ladrillos y Rasti. De todas ellas se estudiaron las diferentes características de los productos que éstas ofrecen; también se realizaron encuestas a docentes y directivos de escuelas primarias y secundarias de Río Cuarto y la zona. Una vez obtenidos los datos, se procedió a agruparlos en 3 grandes categorías: capacitación, equipamiento y experiencia del cliente. A partir de allí se delinearon los objetivos básicos: desarrollar un robot educativo libre y basado en industrial nacional, de costo accesible, modular, robusto, con buena autonomía de uso, tecnología 3D y programable mediante bloques (Correa et. al., 2021). Así surgió la primera versión del robot, que fue bautizado con el mismo nombre del proyecto, AMULEN.
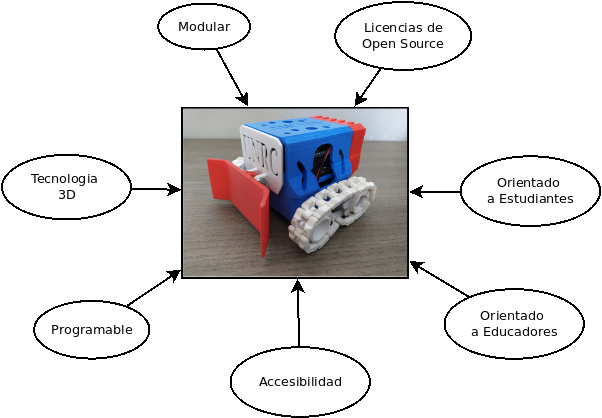
Figura 1: Características de AMULEN
3. Piche – Gestación
A mediados del año 2020, equipos de investigación de la UNRC participaron de una reunión con el Parlamento Ranquel. El objetivo de la misma, fue presentar el Proyecto AMULEN y describir sus características: el desarrollo de un robot educativo soberano, libre, de bajo costo y desarrollado en nuestro país, para el abordaje de los NAPEDPyR y como juguete STREAM, desde un paradigma inclusivo, en contexto de territorio y con compromiso social. Previo a dicha reunión, y como parte de esa mirada desde la inclusión, el territorio y el compromiso social, AMULEN comenzó a interactuar con el Programa de Investigación “Historia y registros: frontera, etnicidad y racismo en el Cono Sur (siglos XVIII-XXI)”, también de la UNRC, para incorporar aspectos relacionados con la cultura ranquel.
Durante la reunión virtual, los miembros del Parlamento Ranquel manifestaron su beneplácito y compromiso para participar activamente del Proyecto AMULEN. Se conformó una agenda de trabajo con el objetivo de delinear algunas características del robot que le den identidad (por ejemplo su coraza, logo y colores) y en la elaboración conjunta de materiales de aprendizaje que, además del abordaje de los NAPEDPyR, también posibiliten trabajar aspectos relacionados con la identidad y la cultura ranquel, historia, geografía, flora y fauna autóctona. Podríamos decir que ese fue el puntapié inicial para la segunda versión del robot. Luego de compartir una serie de fotos y videos con el nuevo diseño del robot, desde el Parlamento Ranquel propusieron que se llamara Piche, dado que su aspecto y movimientos se asemejan a los de un peludo, que por otra parte es una animal autóctono muy querido por la Comunidad.
3.1 Proceso Productivo – Metodología de Desarrollo
Durante la primera etapa del Proyecto AMULEN, se contempló trabajar bajo la metodología SCRUM, logrando sentar las bases de la misma en el equipo, teniendo como pilar la presencialidad; por lo que en la segunda etapa y ya conociendo las ceremonias con los roles definidos, se decide (influenciados por la cuarentena Covid-19), implementar una especie de metodología híbrida entre SCRUM y Kanban, teniendo presente que el proceso de desarrollo de los diferentes módulos (inherentes al robot Piche) se fabrican de forma desacoplada y completamente remotos. A su vez maximizamos el uso de los procesos de revisión de código, mediado por Pair Programming de una manera necesaria para generar versiones de código betas o pre-alphas estables.
En la segunda se incorporaron nuevos integrantes al equipo por lo que fue necesario realizar una inducción del trabajo realizado hasta el momento. La misma, se realizó de una manera más rápida, con el objetivo de ir explicando y capacitando al nuevo miembro del equipo a medida que se iban desarrollando las tareas. Esta forma de trabajo, nos resultó más práctica y eficiente. Priorizando en todo momento los roles como las capacidades adquiridas de los integrantes mediados por capacitaciones en las herramientas de trabajo.
3.2 Programación mediante Bloques
Como parte de los trabajos a futuro planteados en la primera etapa, se propuso darle continuidad al desarrollo de nuevos casos de usos y mejorar los anteriores. A raíz de eso, realizamos dos grandes aportes: por un lado, se refactorizó el código de los bloques ya existentes para que sea escalable en relación a las nuevas funciones (reutilización de código existente) y mantenible, teniendo como principal pilar los principios SOLID como el mantener un bajo índice de acoplamiento incrementando la cohesión de los módulos desarrollados.
Por otro lado, se pensó como estrategia de modelado de las nuevas funcionalidades y guiados por las necesidad de que los diferentes bloques (funciones atómicas) deberían interactuar entre sí de manera independiente del contexto (escenario programado) a los siguientes bloques:
- Mover (Atrás / Adelante)
Mediante el uso de parámetros específicos y desarrollados por nuestra cuenta, se redujo el número de bloques necesarios para contemplar los casos de usos existentes. Los bloques Mover Adelante y Mover Atrás ahora pueden ser reemplazados por Mover (Adelante / Atrás), que permite el ingreso como parámetro del sentido del movimiento.
- Buzzer (Encender / Apagar)
Piche ahora cuenta con un buzzer con el que se puede realizar sonidos permitiendo una interacción más con el usuario.
- Led RGB
Se agregó un módulo RGB al cual se puede setear una amplia gama de colores a través de tres parámetros. Con este bloque Piche podría entregar a modo de feedback ciertos estados como el estado de carga de las baterías.
- Medir distancia
Se agregó un sensor de ultrasonido con el objetivo de que Piche pueda interactuar de manera más dinámica con el ambiente. Mediante este bloque puede medir la distancia de los objetos que tiene a su alrededor y en base a eso tomar decisiones.
Para ello fue necesario permitir el ingreso de parámetros entre un rango de valores específicos y ya predefinidos. Como es el caso del bloque Mover, que permite el ingreso del valor Adelante o Atrás (bloques que fueron necesarios desarrollar), brindando la posibilidad de determinar la dirección del movimiento de Piche y el bloque Buzzer que permite ingresar los valores Encender o Apagar para determinar el estado del buzzer.
En las siguientes imágenes se puede observar el desarrollo de los bloques en las 2 etapas.
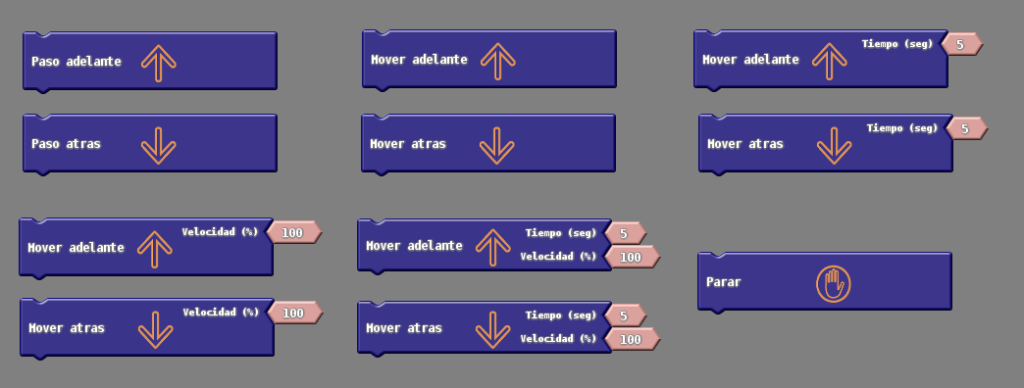
Figura 2: Bloques desarrollados en la Etapa 1.
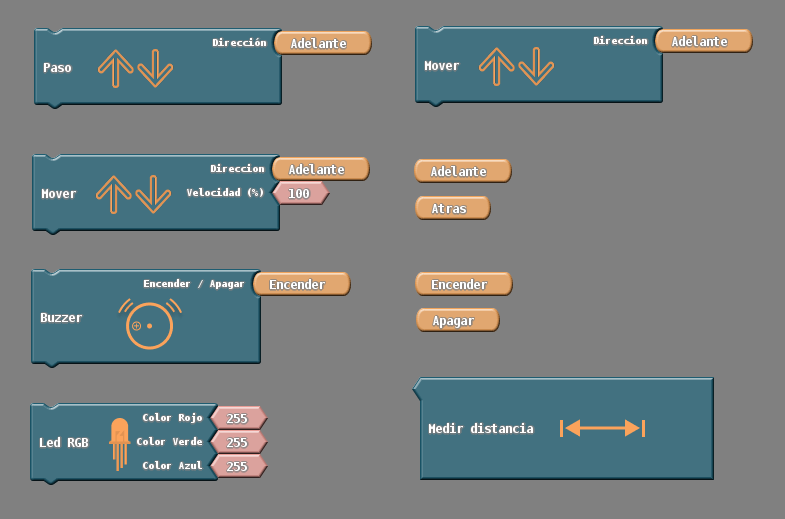
Figura 3: Bloques desarrollados en la Etapa 2.
Como se puede observar, para un mismo escenario podemos utilizar bloques que se desarrollaron en la etapa 1 o bloques que se desarrollaron en la etapa 2. Si tomamos como ejemplo el caso de dar un paso hacia adelante y uno hacia atrás, podemos usar los bloques ‘Paso adelante’ y ‘Paso atrás’ desarrollados en la etapa 1 o también lo podemos hacer con 2 bloques ‘Paso’, desarrollado en la etapa 2, insertando los parámetros ‘Adelante’ o ‘Atrás’. Dependiendo del nivel de abstracción, complejidad o nivel educativo en el que se aplique, se decidirá por un caso o el otro.
Para que sea más fácil distinguir el set de bloques a utilizar se tomó la decisión de utilizar colores diferentes.
3.3 Modelado y diseño de Piche
En esta segunda etapa se desarrolló una nueva versión con la finalidad de tener un diseño más robusto y cerrado. También se trabajó con archivos editables y paramétricos para futuras mejoras y desarrollos.
Piche está diseñado para soportar movimientos bruscos, golpes o caídas. Por ese motivo se desarrolló un modelo rígido, con la intención de que Piche no pueda ser deformado por medio de ninguna fuerza aplicada desde el exterior. De esta forma se busca durabilidad en la manipulación, tanto en el aula como en el hogar. Además, la carcasa posee encastres específicos para cada uno de los componentes electrónicos, como forma de minimizar las posibilidades de sufrir daños, fisuras de soldaduras o movimientos internos.
En la siguiente imagen se puede observar el nuevo diseño de carcasa realizado en esta segunda etapa. En flechas rojas se representan las fuerzas externas que piche puede soportar.
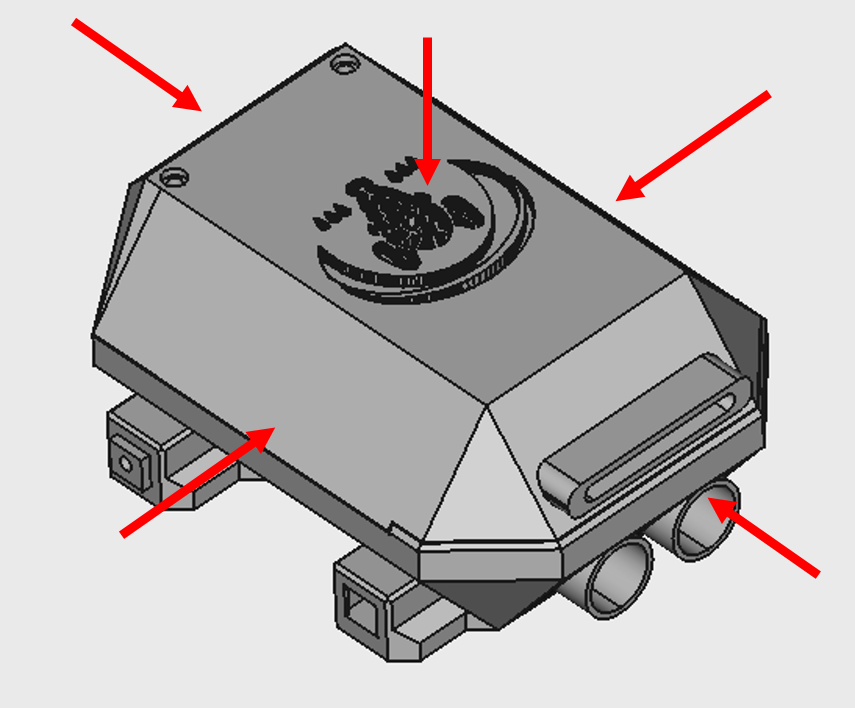
Figura 4: Nueva carcasa desarrollada en la Etapa 2.
Además, priorizamos la protección de la electrónica debido a su gran importancia, por ello se realizó un diseño de carcasa que fuera lo más cerrado posible, evitando así que puedan ingresar objetos extraños y pueda dañar la electrónica.
También, y atendiendo a la necesidad de trabajar con archivos editables, se decidió desarrollar a Piche en FreeCAD, software hecho principalmente para diseñar objetos de la vida real de cualquier tamaño. La elección de este software se basó principalmente en la motivación de tener, en todas las etapas de diseño, el código fuente, con la intención, de que nos permita acoplar al proceso de fabricación, el versionado de los diferentes pre-alphas o prototipos betas necesarios para generar tanto pruebas de concepto como pruebas de banco (simulación productiva).
En la siguiente imagen se muestran las mejoras hechas en esta nueva versión:
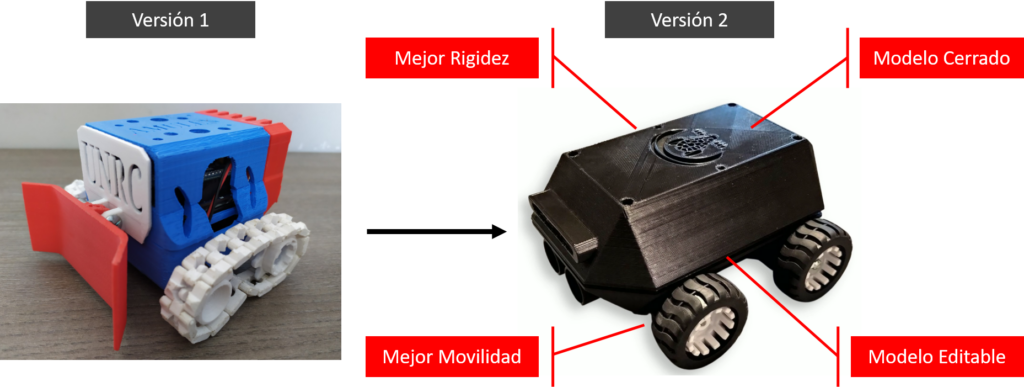
Figura 5: Mejoras entre la primera y la segunda versión.
Además, el diseño de los encastres de las carcasas y las ubicaciones de los diferentes componentes electrónicos están pensados para que, en caso de realizar reparaciones, sea de fácil acceso a los mismos, sin tener que desoldar las conexiones o forzar el cableado.
En la siguiente imagen se muestra el diseño interno de Piche:
Figura 6: Diseño interno de Piche.
Como se puede ver en la figura anterior, son necesarias solo 3 piezas para imprimir a Piche. La carcasa inferior donde se montan los diferentes componentes electrónicos, un módulo intermedio de soporte para las baterías y fuentes necesarias para alimentar toda la electrónica y la carcasa superior.
Las dimensiones y peso aproximado de piche luego de montados todos los componentes son:
- Ancho = 14 cm
- Largo =14 cm
- Alto =8 cm
- Peso (kg)= 400 grs
Finalmente, para optimizar los tiempos de impresión de las carcasas, se creó un diseño específico que tiene como objetivo evitar los soportes (necesarios a la hora de realizar las impresiones de las diferentes piezas) o sobrantes al finalizar cada impresión.
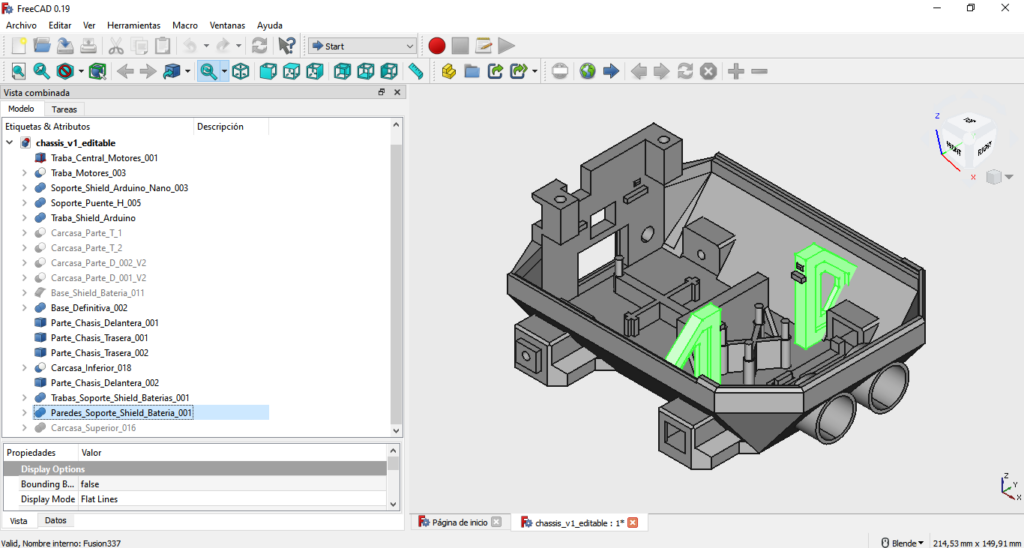
Figura 7: Diseño de la carcasa inferior de Piche en FreeCAD.
Piche cuenta con una placa microcontroladora Arduino Nano, basada en el microchip ATmega328P (old bootloader), 4 ruedas todo terreno, 2 motores en las ruedas delanteras, 1 sensor ultrasónico en su parte frontal que le permite precisar distancias, actuadores de luz, sonido y piezas encastrables. Para su funcionamiento se optimizó su sistema de control de energía, haciendo uso de 1 batería níquel-cadmio de larga duración y una placa controladora que permite recargar la batería mediante micro USB.
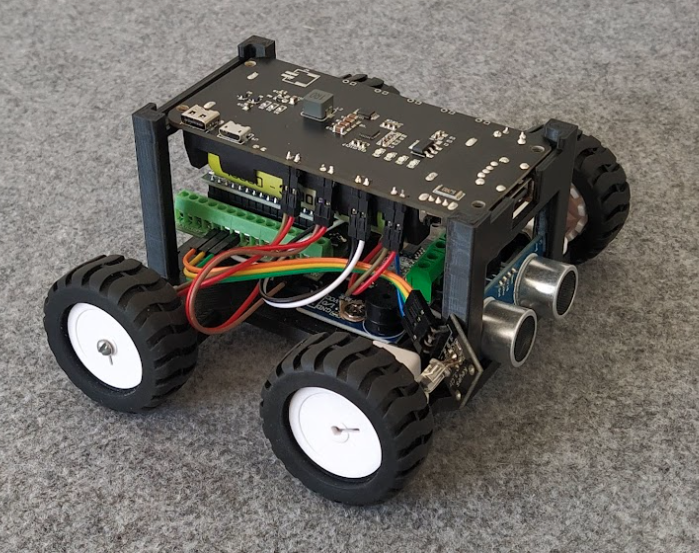
Figura 8: Componentes internos de Piche.
3.4 Formación
Como el proyecto forma parte de los PEVE, los estudiantes participaron de los módulos del Trayecto en desarrollo emprendedor dictado por la UNRC para poder cumplir con los requisitos solicitados por la beca. Este trayecto tiene como objetivo general aportar formación integral a estudiantes y graduados en habilidades y competencias para emprender, fortaleciendo su proceso de formación y estimulando su vocación emprendedora. Para la aprobación del mismo se solicitaba la aprobación de los cuatros primeros módulos del trayecto en desarrollo emprendedor a los becados como complemento a las actividades comprometidas en el plan de trabajo de la beca EVE.
La temática abarcada de los cuatro primeros módulos del trayecto fueron:
- Módulo N°1: Enfoque y Dimensiones del Emprendedorismo.
- Módulo N°2: Oportunidades de Negocio.
- Módulo N°3: Modelos de Negocios.
- Módulo N°4: Design Thinking.
Como cierre del proyecto PEVE y del trayecto en desarrollo emprendedor, la UNRC invitó a todos a un encuentro llamado “Demo Day” con el objetivo de dar un cierre formal al proyecto. Previo al encuentro fué necesario crear un pitch del emprendimiento en formato digital, donde se potenciaban tanto las bondades y los objetivos de cada proyecto, como así también los aportes y desarrollos de los becarios. Los mismos se presentaron frente a representantes de la Incubadora de Empresas de la
Universidad Nacional de Río Cuarto, miembros del Centro de Cultura Emprendedora (entidad que financia las Becas de Estímulo a la Vocación Emprendedora) y actores del ecosistema emprendedor (Córdoba Incuba y Agencia Córdoba Innovar y Emprender). Al finalizar se realizó una votación entre los participantes del “Demo Day”, resultando ganadora la presentación de PICHE, en categoría “Mejor pitch”.
4. Conclusiones y trabajo futuro
Como trabajo a futuro se plantea por un lado, realizar mejoras tanto en la funcionalidad como en el diseño del prototipo, de las cuales en relación al software y al hardware podemos mencionar:
- Nuevos casos de usos referidos a la gestión de movimiento, particularmente al movimiento rotacional.
- Refactorizar el diseño de Piche para que sea más pequeño, permitiendo encastrar módulos o elementos externos.
- Diseñar una placa electrónica propia, que permita reducir el tamaño de Piche, al igual que el peso y de esta manera repensar la lógica de conexionado de la electrónica.
- Presentar a Piche a la comunidad Ranquel, obtener retroalimentación y en base a eso trabajar en el look and feel externo para que se asemeje más a un armadillo.
- Coordinar el uso de Piche en dos escuelas, una de Río Cuarto y otra de Las Higueras, con el objetivo de evaluar la usabilidad.
Por otro lado, se plantea poder realizar el registro de la marca AMULEN para comenzar con la creación de un Spin Off universitario a raíz de este proyecto, con la ayuda de la Incubadora de Empresas de la Universidad Nacional de Río Cuarto. También tenemos como objetivo registrar la carcasa de Piche como modelo industrial, estimar el costo de su producción en serie y comenzar el diseño de materiales de aprendizaje (con desafíos y soluciones comentadas a nivel primario y secundario) para abordar los conceptos de pensamiento computacional y los NAPEDPyR desde un paradigma inclusivo y con compromiso social.
5. Bibliografía y referencias
5.1 Bibliografía
- Astudillo, G. J.; Bast, S. G.; Willging, P.; Segovia, D. ; Castro, L. & Distel, J. M. (2019) Estrategias innovadoras en los procesos de enseñanza y de aprendizajes de informática. XXI Workshop de Investigadores en Ciencias de la Computación. WICC19 (pp.600-604) . San Juan. ISBN 978-987-3984-85-3
- Benítez Larghi, S. (2020). Desafíos de la inclusión digital en Argentina. Una mirada sobre el Programa Conectar Igualdad. En Revista de Ciencias Sociales, DS-FCS, vol. 33, n.º 46, enero-junio 2020, pp. 131-154. Publicación del Departamento de Sociología de la Universidad de la República. Uruguay.
- Bordignon, F., y Alejandro, I. (2015). Diseño y construcción de objetos interactivos digitales. Edit. UNIPE Editorial Universitaria. https://libros.unlp.edu.ar/index.php/unlp/catalog/book/478
- Burbules, N. (2011). Entrevista a Nicholas Burbules. Educación y tecnologías : las voces de los expertos. Conectar Igualdad. https://www.academia.edu/
- Compañ-Rosique, P., Satorre-Cuerda, R., Llorens-Largo, F., Molina-Carmona, R., (2015). Enseñando a programar: un camino directo para desarrollar el pensamiento computacional. RED- Revista de Educación a Distancia, 46 (11). https://revistas.um.es/red/article/view/240191/182931
- Correa, C. M.; Etcheverry, P. L.; Ferreira Szpiniak, A. (2021). AMULEN: robot educativo soberano. Jornadas Argentinas de Didáctica de las Ciencias de la Computación.
- Cucuzza, G. (2019). Sobre los NAP de Educación Digital, Programación y Robótica: ¿Otra vez sopa? https://paraquesepan.blogspot.com/2019/01/sobre-los-nap-de-educacion-digital.html
- Ferreira Szpiniak, A; Etcheverry, P. (2019). Herramientas para descubrir vocaciones científicas y vincular la universidad con la escuela secundaria: talleres, olimpiadas y festivales de robótica y programación. Segundas JADiPro. Córdoba. 7 y 8 de junio 2019.
- Ferreira Szpiniak, A; Locati, M. (2019) ¿Para qué la robótica en la escuela? Una mirada nacional situada en la Provincia de Córdoba. Segundas JADiPro. Córdoba. 7 y 8 de junio 2019.
- Maggio, M. (2012). Enriquecer la enseñanza. Los ambientes con alta disposición tecnológica como oportunidad. Buenos Aires. Editorial Paidós.
- Monsalves González, S. (2011). Estudio sobre la utilidad de la robótica educativa desde la perspectiva del docente. Revista de Pedagogía, 32(90), 81-117. https://www.redalyc.org/articulo.oa?id=65920055004
- Willging, P. A., Astudillo, G. J, Bast, S., Occelli, M., Castro, L., & Distel. J. (2017). Educación con Tecnologías: la Robótica Educativa Aplicada para el Aprendizaje de la Programación. Memorias WICC 2017, XIX Workshop de Investigadores en Ciencias de la Computación, RedUNCI, 1174-1178. (ISBN: 978-987-42-5143-5).
- Wing, J. M. (2006). Computational Thinking. Viewpoint. Communications of the ACM, Vol. 49, 33-35. https://www.cs.cmu.edu/~./15110-s13/Wing06-ct.pdf
- Wing, J. M. (2011). Computational Thinking: What and Why? The Link Magazine, Spring.
- Zabala, G. (2012). Robots o el sueño eterno de las máquinas inteligentes. ISBN 978-987-629-222-1. http://www.sigloxxieditores.com.ar
5.2 Referencias
- ANSES. Observatorio de la Seguridad Social (2021). Conectar Igualdad a 11 años de su creación. La consagración del derecho a enseñar y aprender. Dirección Estudios de la Seguridad Social. Recuperado el 20 de junio de 2022 de: http://observatorio.anses.gob.ar/archivos/documentos/Conectar%20Igualdad%20a%2011%20an%CC%83os.pdf
- Núcleo de Aprendizajes Prioritarios de Educación Digital, Programación y Robótica. Educ.ar (2018). Recuperado el 20 de junio de 2022 de: https://www.educ.ar/recursos/150123/nap-de-educacion-digital-programacion-y-robotica?from=86
- Orientaciones pedagógicas de Educación Digital. Ministerio de Educación de la Nación (2017). Recuperado el 20 de junio de 2022 de. https://www.educ.ar/recursos/132262/orientaciones-pedagogicas-de-educacion-digital
- Programación y robótica: objetivos de aprendizaje para la educación obligatoria. Ministerio de Educación, Cultura, Ciencia y Tecnología de la Nación (2017). Recuperado el 20 de junio de 2022 de: https://www.educ.ar/recursos/132339/programacion-y-robotica-objetivos-de-aprendizaje-para-la-educacion-obligatoria
- Resolución CFCyE N° 225/04 (2004). Recuperado el 20 de junio de 2022 de: https://cfe.educacion.gob.ar/resoluciones/res04/225-04.pdf
- Resolución Consejo Federal de Educación Nº 263/15 (2015). Recuperado el 20 de junio de 2022 de: https://cfe.educacion.gob.ar/resoluciones/res15/263-15.pdf
- Resolución Consejo Federal de Educación Nº 343/18 (2018). Recuperado el 20 de junio de 2022 de: https://www.argentina.gob.ar/sites/default/files/res_cfe_343_18_0.pdf
- UNESCO. SITEAL (2020). Sistematización de respuestas de los sistemas educativos de América Latina a la crisis de la COVID-19. Recuperado el 20 de junio de 2022 de: https://siteal.iiep.unesco.org/respuestas_educativas_covid_19
Deja una respuesta